

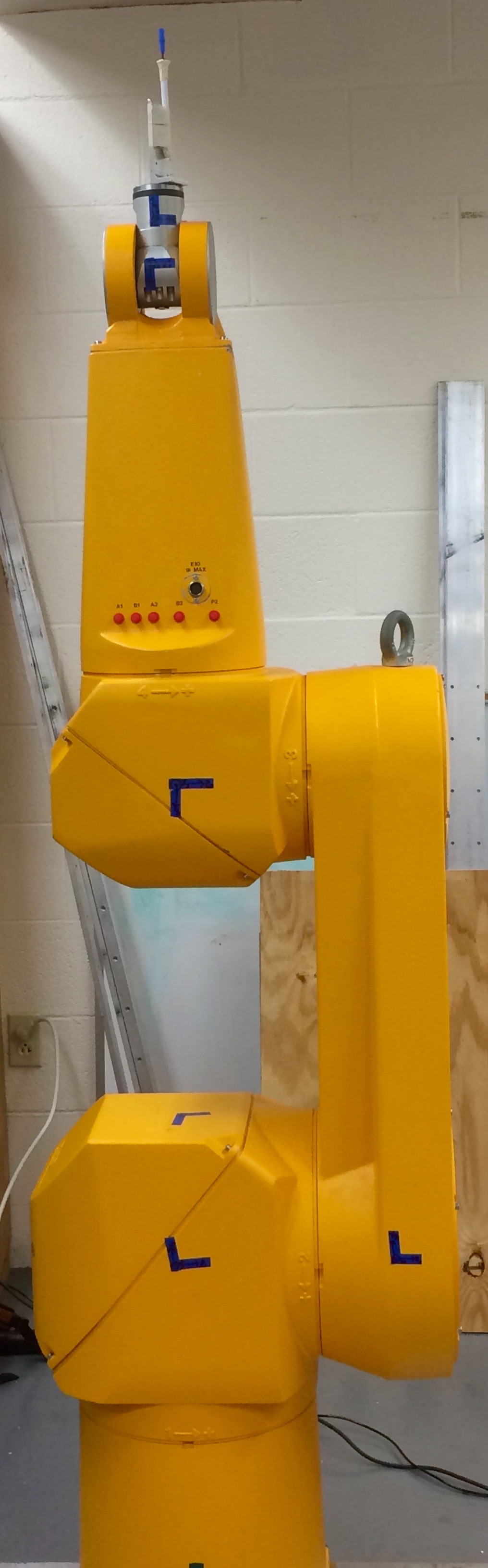
This summer I have been working with Dr. Chris Crawford at the University of Kentucky. We have been trying to design a cosine theta coil, which is a magnetic coil that has a uniform magnetic field on the inside, but no field on the outside. Beyond this, we also wanted to create this magnet using without using wires on the endcaps. To do this we would need to drill circuit boards that carried surface currents through them. To create the circuit boards we used a drill mounted on a robotic arm (pictured without the drill attached) to drill through special current carrying materials.
Through the summer most of our time has been taken up by learning the programing system that had been created over the past several years of the project on MatLab, calibrating the various aspects of the robot so we could very accurately tell the robot where to drill, and finally actually designing the endcap. By the time I was finished we had gone from barely being able to get the robot to draw on a whiteboard to being able to drill basic designs for the magnet. We had also just finished the first full design of the magnet. Unfortunately I was not able to stay long enough to drill it and be able to test it, but the next team should be able to accomplish that soon!